Transformation Matrix Rotation Translation Order
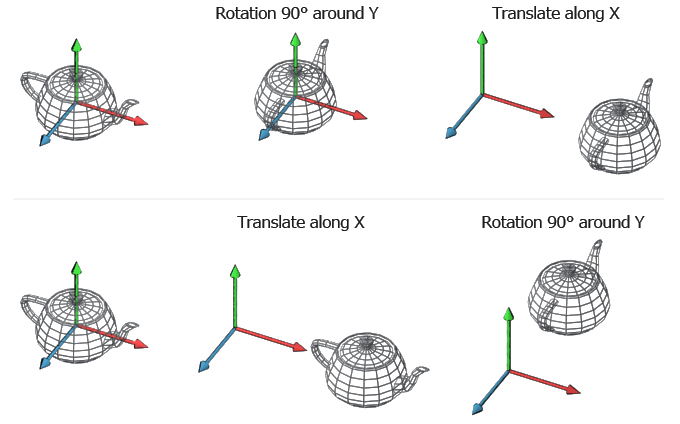
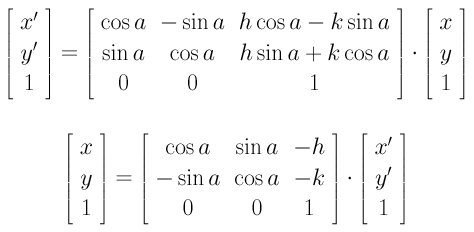
Represents a rotation followed by a translation. It considers a reflection a rotation and a composite transformation.

Understanding 3d Matrix Transforms By Shukant Pal The Startup Medium
If you got the transformations in the wrong order you lost 5 points.
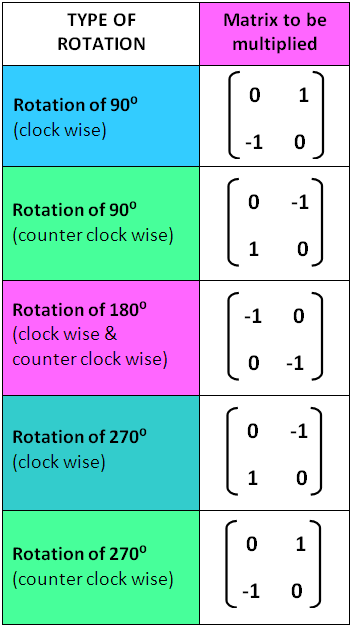
Transformation matrix rotation translation order. Displaystyle R theta begin bmatrixcos theta -sin theta sin theta cos theta end bmatrix. The matrix produced by the product SRT is different from the matrix. T for translation matrix R for the rotation matrix and S for the scaling matrix that would be.
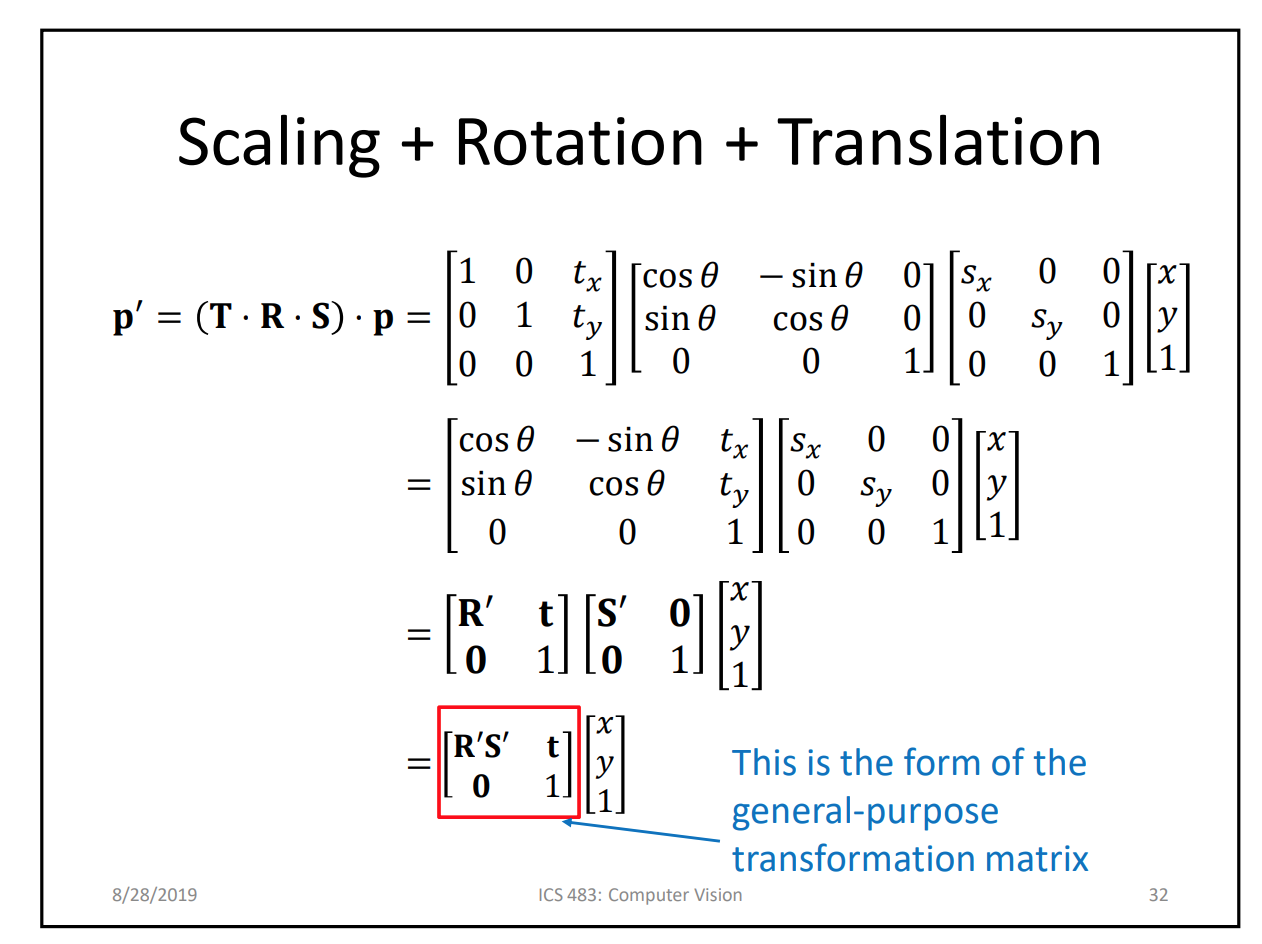
With a translation matrix we can move objects in any of the 3 axis directions x y z making it a very useful transformation matrix for our transformation toolkit. Depending on how you define your xyz points it can be either a column vector or a row vector. Any combination of the order SRT gives a valid transformation matrix.
If S R and T are scale rotation and translation matrices respectively then the product SRT in that order is the matrix of the composite transformation that first scales then rotates then translates. So If I am not wrong the order is Translate Rotate Scale vector_to_transform. 1 translation Ttx ty 01 translation Ttxty0 -MMxTtxty0 M M x Ttxty0 2 rotation R - M M x R 3 Now transform a point P - P M x P.
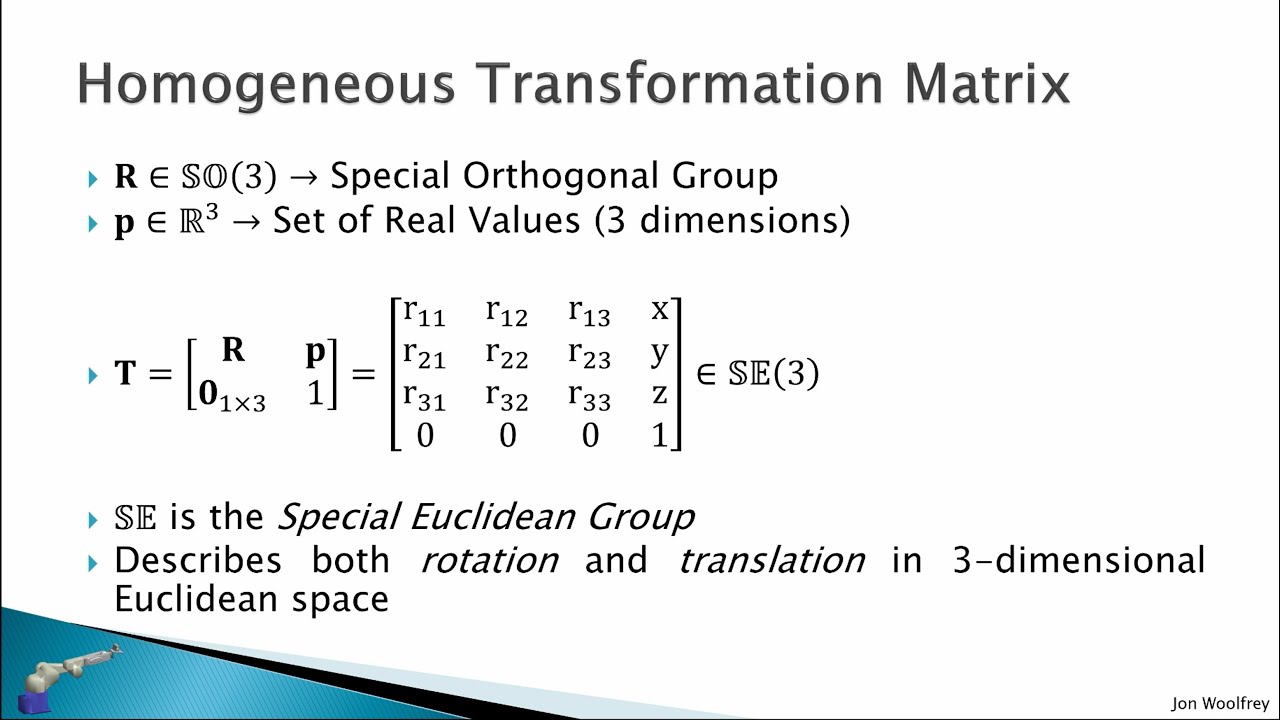
The vector is initially aligned with the x -axis. The matrix will be referred to as a homogeneous transformation matrix. Each primitive can be transformed using the inverse of resulting in a transformed solid model of the robot.
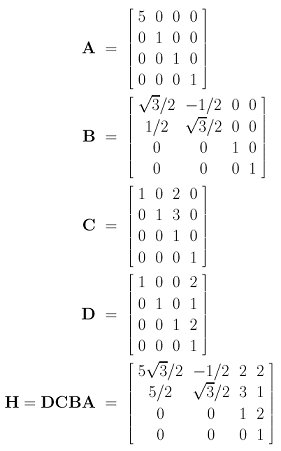
For example if you would first do a translation and then scale the translation vector would also scale. L T R S. Cos 30 0866 sin30 05 T1 is Rotation with 90 T2 is Translation T3 is Rotation with 30.
For example if you are rotating 45 degrees. For a column vector we pre-multiply the rotationtransformation matrix which is in a column-major format. Before the rotation you could translate by 01 to move up 1 inch.
However if you want to rotate an object around a certain point then it is scale point translation rotation. An nx1 matrix is called a column vector and a 1xn matrix is called a row vector. It is important to remember that represents a rotation followed by a translation not the other way around.
You got full credit if you gave one of these two answers or an equivalent. R θ cos θ sin θ sin θ cos θ. It is advised to first do scaling operations then rotations and lastly translations when combining matrices otherwise they might negatively affect each other.
After rotation you will have to translate by roughly -70707 070707 to move up 1 inch relative to the original coordinate system. T R S. If you do not do it in that order then a non-uniform scaling will be affected by the previous rotation making your object look skewed.
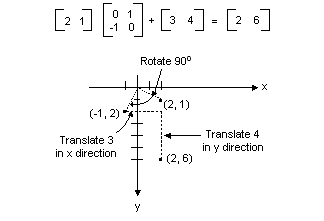
The last few transformations were relatively easy to understand and visualize in 2D or 3D space but rotations are a bit trickier. 42 It is important to note that performs the roll first then the pitch and finally the yaw. Rotate a triangle with vertices 2 1.
Usually it is scale then rotation and lastly translation. 3 3 by 90 degrees clock wise and then Translate it by Tx 4 and Ty 3 and finally rotate it by 30 degrees anti-clock wise. In two dimensions the standard rotation matrix has the following form.
With matrix denotation ie. If you forgot to invert the transformations you lost 5 points. A single rotation matrix can be formed by multiplying the yaw pitch and roll rotation matrices to obtain 3.
However it is pretty common to first scale the object then rotate it then translate it. This video looks at how we can work out a given transformation from the 2x2 matrix.

Geometric Transformations
Matrix Representation Of Transformations Win32 Apps Microsoft Docs
Geometric Transformations
3d Transformations
Coding Labs World View And Projection Transformation Matrices
Andrea Geremia Vfx Artist

Rotation Transformation Matrix
1 10 Points Find The 2d Transformation Matrix For Chegg Com

Concatenating Translation And Rotation Matrix What Am I Doing Wrong Mathematics Stack Exchange
![]()
Basics Of Affine Transformation Neutrium
Transforming Objects Handle Graphics Objects Graphics

A Complete Overview Of Matrix Transformations In The Solidworks Api
3 1 Transformation Matrices Youtube
![]()
Spatial Transformation Matrices
![]()
Transformation And Projection Matrices For Fun And Profit Enviral Design
Geometric Transformations
Matrix Representation Of Transformations Win32 Apps Microsoft Docs

Describing Rotation And Translation In 2d Robot Academy
![]()
The Transformation Matrix