Multiplication Of Matrices Rotation
You da real mvps. First row of the rotation matrix r00 npcosgamma npcosbeta r01 npcosgamma npsinbeta npsinalpha - npsingamma npcosalpha r02 npcosgamma npsinbeta npcosalpha npsingamma npsinalpha Second row of the rotation matrix r10 npsingamma npcosbeta r11 npsingamma npsinbeta npsinalpha npcosgamma npcosalpha.
Using Pre Multiply Or Post Multipy For Rotational Matrix To Get A New Homogenous Transformation Matrix Robotics Stack Exchange
If we want to display the object so that it is first flipped over from our right to our left and then the axis projected toward us is tilted upward 20degrees what matrix can the computer.
Multiplication of matrices rotation. Coordinates of the point. The resultVector element values are undefined if the resultVector elements overlap either the lhsMatrix or rhsVector elements. A little sketch shows that it is a rotation of the xz plane where the x axis rotates over an angle π 2 towards the z axis.
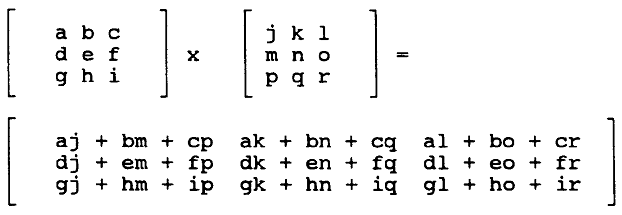
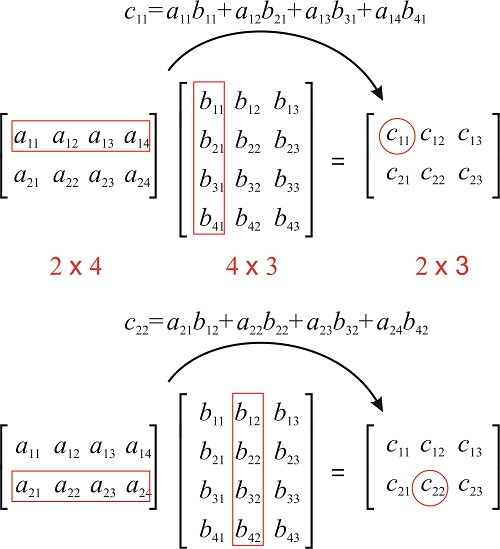
The product of these two matrices lets call it C is found by multiplying the entries in the first row of column A by the entries in the first column of B and summing them together. In two and three dimensions rotation matrices are among the simplest algebraic descriptions of rotations and are used extensively for computations in geometry physics and. This can be written in matrix and tensor notation as R RT I and RikRjk δij R R T I and R i k R j k δ i j.
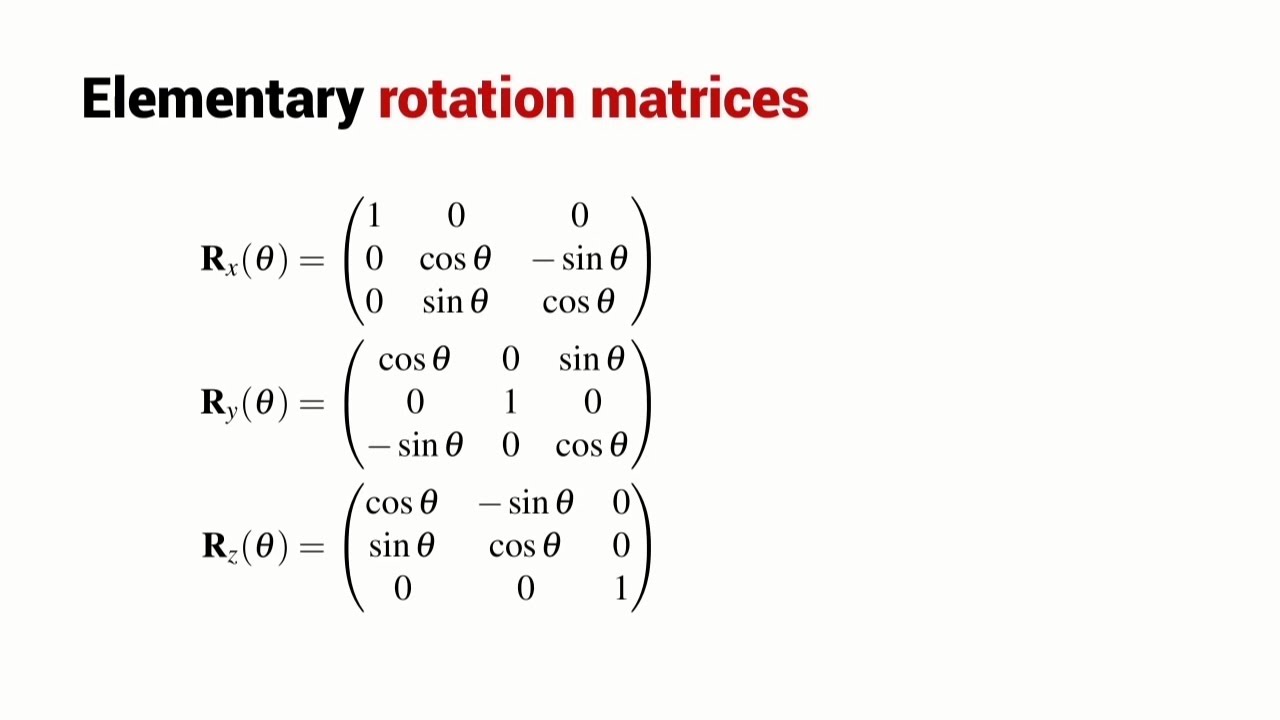
Usually it is scale then rotation and lastly translation. R rotx 30 R 33 10000 0 0 0 08660 -05000 0 05000 08660. Construct the matrix for a rotation of a vector around the x-axis by 30.
T for translation matrix R for the rotation matrix and S for the scaling matrix that would be. When an object undergoes a transformation the transformation can be represented as a matrix. T R S However if you want to rotate an object around a certain point then it is scale point.
Result lhs x rhs. 1 0 0 0 0 1 0 1 0 x y z and so really your post-multiplication operation is given by 2 rather than 1. A rotation maps every point of a preimage to an image rotated about a center point usually the origin using a rotation matrix.
Thanks to all of you who support me on Patreon. By multiplying each point as a vector by an appropriate rotation matrix and then displaying the result. That is post-multiplying the rotation R A O by the rotation R O B is given by the matrix R.
1 per month helps. That is the rotation matrix R A O operates on the vector x y z by. OpenGL Post-Multiplication OpenGL post-multiplies each new transformation matrix M M x M new Example.
This video provides an example of how matrix multiplication can be used to perform a rotation on the coordinate planeSite. A positive z ends up pointing in a negative x direction. This single value becomes the entry in the first row first column of matrix C.
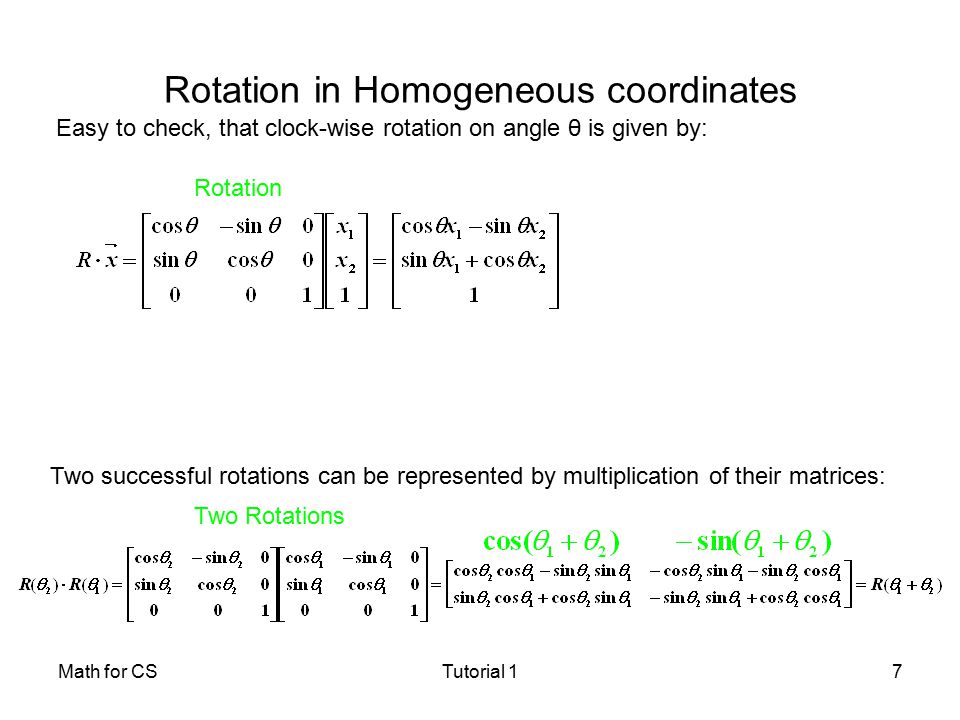
A rotated vector is obtained by using the matrix multiplication Rv see below for details. Multiplication of Rotation Matrices Recall from above that the dot product of any two different rows or columns of a rotation matrix is zero while the dot product of any row or column with itself is one. Thus we can writeTheorem 14 asRRR.
To rotate counterclockwise about the origin multiply the vertex matrix by the given matrix. MatrixmultiplyMV is a method to multiply a 4 element vector by a 4x4 matrix and store the result in a 4 element column vector. Thanks to all of you who s.
0 R 2 1 2sinsin2 cos2 1 0 Because rotations are actually matrices and because function compositionfor matrices is matrix multiplication well often multiply rotation functionssuch asRR to mean that we are composing them. Perform translation then rotation 0 M Identity 1 translation Ttx ty 01 translation Ttxty0 -MMxTtxty0 M M x Ttxty0 2 rotation R - M M x R 3 Now transform a point P - P M x P. Then let the matrix operate on a vector.
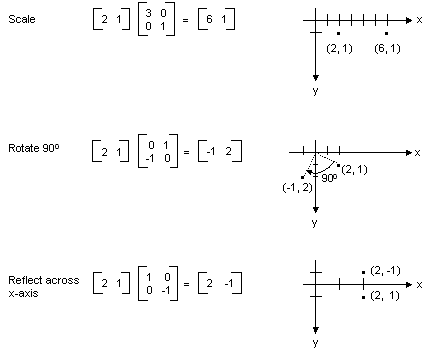
One matrix can also represent multiple transformations in sequence when the matrices are multiplied together. Use the following rules to rotate the figure for a specified rotation. With matrix denotation ie.
Your matrix swaps x and z and leaves y unchanged. Maths - Rotation Matrices Rotations can be represented by orthogonal matrices there is an equivalence with quaternion multiplication as described here First rotation about z axis assume a rotation of a in an anticlockwise direction this can be represented by a vector in the positive z direction out of the page. Different transformations such as translations rotations scaling and shearing are represented mathematically in different ways.
Under a rotation around the x -axis the x-component of a vector is invariant. This is also known as the dot product. Y 31 20000 -37321 24641.
Multiplication Order Of Rotation Matrices Mathematics Stack Exchange
Inverting The Rotation Along The X And The Y Axis While Keeping Z Intact Stack Overflow
Describing Rotation In 3d Robot Academy
Matrices

Matrices Algebra Equations

Orientation Angles

Matrices
Matrix Representation Of Transformations Win32 Apps Microsoft Docs
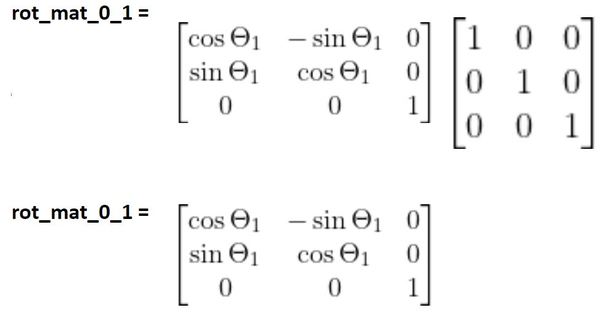
How To Find The Rotation Matrices For Robotic Arms Automatic Addison
15 3 Matrix Multiplication Chemistry Libretexts
Math For Cstutorial 11 Matrix Multiplication Rule Matrices Make Linear Transformations Of Vectors Ppt Download
Matrix Rotations
Rotation Matrix Wikiwand

Rotation Matrix Wikiwand


Applicaton Of Matrix Multiplication Transformations Youtube
Matrices
Matrix Multiplication Calculator

Matrix Multiplication 2 000 Things You Should Know About Wpf
Transforming Objects Handle Graphics Objects Graphics