Opencv Fundamental Matrix C++
Output 3x3 fundamental matrix. The 8-point algorithm is the simplest method of computing fundamental matrix but if care is taken you can perform it well.
Computing Fundamental Matrix And Drawing Epipolar Lines For Stereo Vision Cameras In Opencv Robotics With Ros
Input 2xN Array of 2D points in view 2.
Opencv fundamental matrix c++. Void findFundamentalMatrixstdvectorimagePointsLeftCamerastdvectorimagePointsRightCamera stdvectorEstimated Reading Time. Input 2xN Array of 2D points in view 1. But in case of the 7-point algorithm the function may return up to 3 solutions 9 times 3 matrix that stores all 3 matrices sequentially.
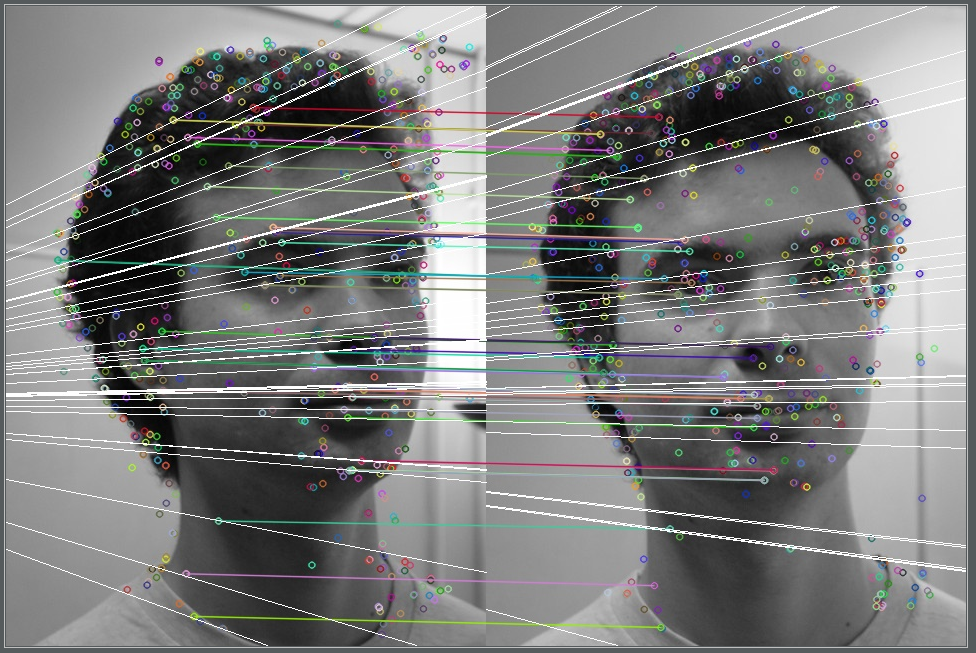
As currently implemented in OpenCV the 8-point algorithm has Calculates a fundamental matrix from the corresponding points in two images. In our newsletter we share OpenCV tutorials and examples written in CPython and Computer Vision and Machine Learning algorithms and news. In the documentation it says that in drawMatches the parameter matchesMask - Mask determining which matches are drawn.
OpenCV function is used to calculate fundamental matrix. I want to draw the inlier matches of my Fundamental Matrix to interpretate the results. Many of algorithms can do it.
Estimate the fundamental matrix between two dataset of 2D point image coords space. The parameter mask in findFundamentalMat is used if one uses a method like RANSAC to dermine the inliers and is of typevector. Fundamental matrix is a 33 matrix which relates corresponding points in stereo images.
In the former case the old content is de-referenced. 7-point algorithm is used cvMat fundamentalMatrix cvfindFundamentalMat imagePointsLeftCamera imagePointsRightCamera cvFM_8POINT. Camera calibration with square chessboard.
Find at least 5 well-matched points in both images you can use to calculate the Fundamental Matrix you can use any detector and matcher you like I kept FLANN but used ORB to do detection as SIFT isnt in the main version of OpenCV for 420 Calculate the Fundamental Matrix F with findFundamentalMat. With u1 v1 points 1 coordinate and u2 v2 points 2 coordinate. Where x is u2 v2 1T and x is u1 v1 1 T.
The calculated fundamental matrix should satisfy xT F x 0. Alternately sign up to receive a free Computer Vision Resource Guide. I am using opencv 32 and C.
Using FM_RANSAC right. F cvfindFundamentalMat points1 points2 F mask cvfindFundamentalMat Opencv 3 camera calibration Camera calibration With OpenCV Prev Tutorial. Open Source Computer Vision.
These are various constructors that form a matrix. As noted in the AutomaticAllocation often the default constructor is enough and the proper matrix will be allocated by an OpenCV function. The function calculates the fundamental matrix using one of four methods listed above and returns the found fundamental matrix.
However the calculated fundamental is strange I guess. FM_RANSAC ANSAC algorithm. The constructed matrix can further be assigned to another matrix or matrix expression or can be allocated with Matcreate.
Normally just one matrix is found. It needs at least 15 points. If you liked this article and would like to download code C and Python and example images used in this post please click here.
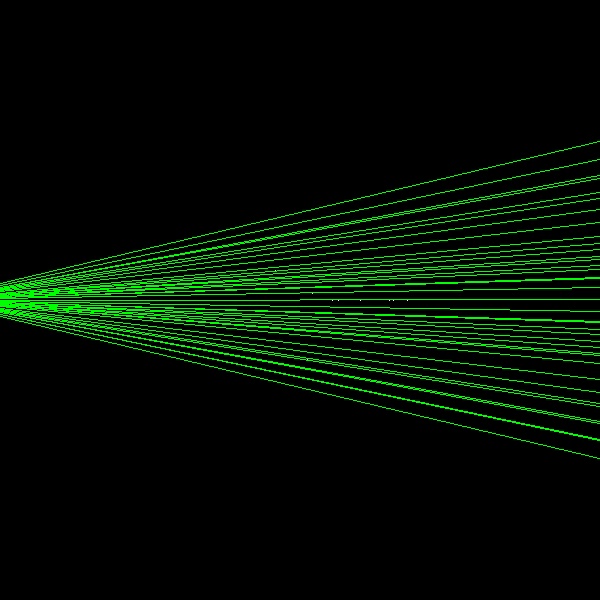
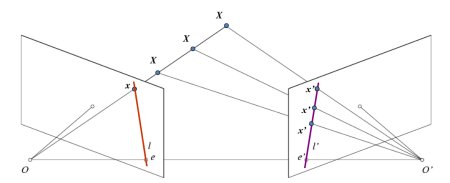
In epipolar geometry with homogeneous image coordinates x and x of corresponding points in a stereo image pair Fx describes a line an epipolar line. CvcomputeCorrespondEpilines imagePointsLeftCamera 1 fundamentalMatrix rightLines. The key to obtain the good results is proper careful normalization of the input data before constructing the equations to solve.
Uses the normalized 8-point fundamental matrix solver. Computing Essential and Fundamental Matrix Using OpenCV 8 Points Algorithm With C.

16 Awesome Opencv Functions For Your Computer Vision Project Computer Vision What Is Computer Deep Learning

Python Opencv Epipolar Geometry Geeksforgeeks

Bookchapter Epipolar Geometry And The Fundamental Matrix Fundamental Geometry Matrix

Python Opencv Epipolar Geometry Geeksforgeeks
Opencv Real Time Pose Estimation Of A Textured Object

Opencv Camera Calibration And 3d Reconstruction

Epipolar Geometry Stereo Vision Using Opencv Stack Overflow
Opencv Epipolar Geometry
Extract Rotation And Translation From Fundamental Matrix Opencv Q A Forum
Strange Epipolar Lines And 3d Reconstruction Opencv For Java Opencv Q A Forum

Python Opencv Epipolar Geometry Geeksforgeeks
Mexopencv Epipolar Geometry Example Github
Opencv Camera Calibration And 3d Reconstruction

The Model Used By The Findfundamentalmat Function In Opencv Programmer Sought

Epipolar Geometry
Opencv Findfundamentalmat Very Unstable And Sensitive Stack Overflow


Opencv 3 Adv Image Detectn Reconstruct Computing Fundamental Matrix Of Img Pair Packtpub Com Youtube
Opencv Camera Calibration And 3d Reconstruction
Introduction To Epipolar Geometry And Stereo Vision Learn Opencv